
罗 绍华 博士/博士后
绍华 博士/博士后
Shaohua Luo PhD/Postdoctor
贵州大学教授、博士生导师、硕士生导师
Professor of the Guizhou University, Doctoral and Master's supervisor
地址:贵州省贵阳市贵州大学机械工程学院
School of Mechanical Engineering, Guizhou University, Guiyang 550025, China
Email: shluo@gzu.edu.cn
个人简介
Individual Resume
贵州省山地智能农机全省重点实验室副主任、省优秀青年科技人才、省创新研究群体负责人、省“企业创新岗”特聘专家、中国农业工程学会新能源农业装备工程专业委员会第一届常务委员、中国农业工程学会高级会员、期刊《Fuzzy Information and Engineering》(中科院SCI3区)Associate Editor、《农业工程学报》(EI检索)、《工程设计学报》和《江苏大学学报》青年编委。
Deputy Director of the Guizhou Provincial Key Laboratory for Mountainous Intelligent Agricultural Machinery, Outstanding Young Scientific and Technological Talent of Guizhou Province, Head of Provincial Innovative Research Group, Special Expert for the Enterprise Innovation Post Program of Guizhou Province, First Standing Committee Members on New Energy Agricultural Equipment Engineering of the Chinese Society of Agricultural Engineering, Senior Member of the Chinese Society of Agricultural Engineering, Associate Editor of the journal Fuzzy Information and Engineering (SCI-indexed), and Youth Editorial Board Member of the journals Transactions of the Chinese Society of Agricultural Engineering (EI-indexed), Journal of Engineering Design, and Journal of Jiangsu University.
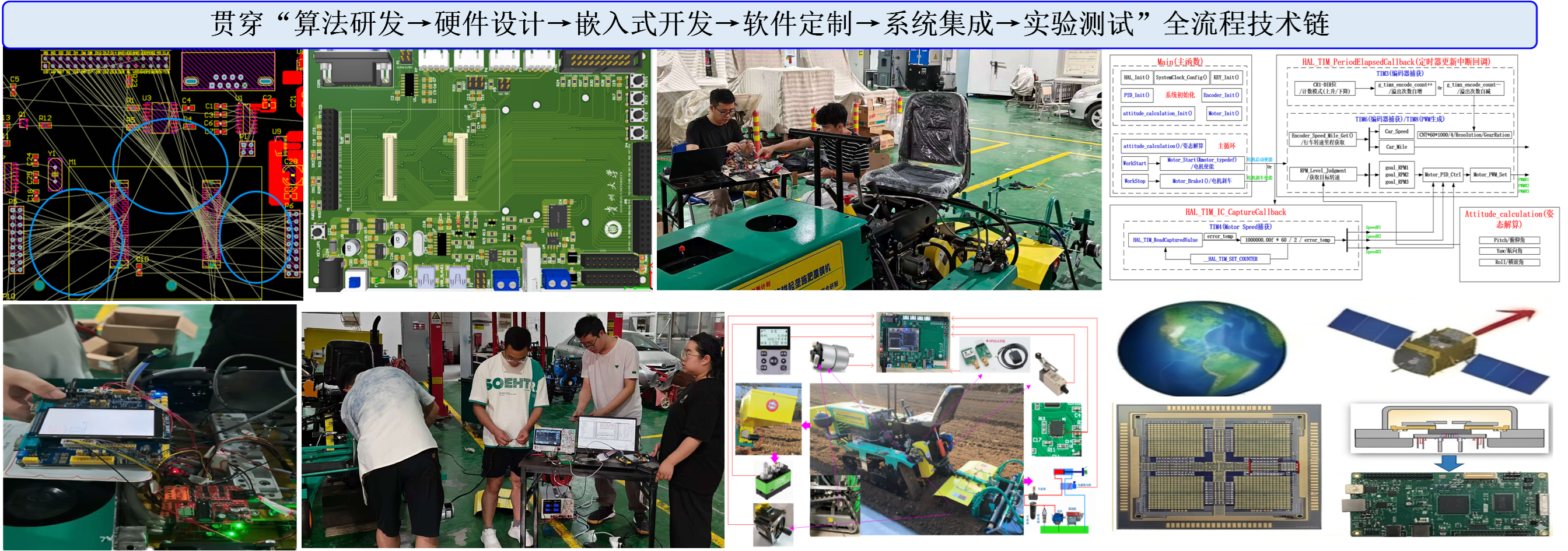
主要从事智能机器人与高端装备的系统动力学、电路设计与智能控制研究,具备从硬件设计、嵌入式开发、上位机软件到系统集成与部署的全流程技术能力。近年来主持了国家自然科学基金、省自然科学基金重点项目、中国博士后科学基金等研究课题,参与了国家“863计划”和国家自然科学基金(重点、面上和国际(地区)合作与交流项目)的研究工作。在MEMS/NEMS、自主智能系统、高性能机电驱动、集成电路设计、智能控制与系统集成等关键领域取得一定的理论与应用成果,在国内外权威学术期刊上发表科研论文70余篇,获授权发明专利近40项(其中美国发明专利1项和英国发明专利4项),转化专利5项,获卓越基金二等奖,多次在国际学术会议上做学术报告,并具有4年多国企与外资企业工程师经历,具备丰富的工程实战经验。
Mainly engaged in research areas such as System Dynamics, Circuit Design, and Intelligent Control of Intelligent Robots and High-End Equipment, covering the entire technical chain from Hardware Design, Embedded Development, Upper-Computer Software to System Integration and Deployment. In recent years, he has led research projects including the National Natural Science Foundation of China, Provincial Natural Science Foundation Key Projects, and the China Postdoctoral Science Foundation, and has participated in research initiatives under the National 863 Program and the National Natural Science Foundation of China (including key projects, general projects, and international/regional cooperation and exchange projects). Achievements have been made both theoretically and practically in key areas such as MEMS/NEMS, Autonomous Intelligent Systems, High-Performance Electromechanical Drives, Integrated Circuit Design, Intelligent Control, and System Integration. Over 70 research papers have been published in authoritative academic journals domestically and internationally. Nearly 40 invention patents have been granted, including one U.S. patent and four British patents, with five patents successfully commercialized. The second prize of the Outstanding Fund Award has been received. Academic presentations have been delivered at multiple international conferences. Additionally, over four years of experience has been accumulated as an engineer in state-owned enterprises and foreign-invested companies, providing rich engineering practice experience.
研究方向
Research Interests
1. 智能机器人与高端装备的系统动力学、电路设计及智能控制;
System dynamics, circuit design, and intelligent control of intelligent robots and high-end equipment;
2. 基于ARM/FPGA芯片架构的高性能边缘计算与控制系统软硬件开发;
ARM/FPGA chip architecture-based high-performance edge computing and control system hardware/software development;
3. 智能农机装备与农业机器人关键技术研究与应用;
Research and application of key technologies in intelligent agricultural machinery equipment and agricultural robots;
4. 先进控制理论及其在机电系统中的应用。
Advanced control theory and its applications in mechatronic systems.
招生专业
Enrollment Specialty
机械工程(学科代码0802)、电子信息(学科代码0854)
Mechanical Engineering, Electronic Information
不唯分数不唯学历不唯论文,欢迎机械工程(机电/机器人方向优先)、自动化、电子科学与技术、集成电路设计与集成系统、数学、电气工程、物理等专业有志有识之士(理论研究与工程落地并重)报考硕、博研究生!如想提前进组,也热烈欢迎!
优先考虑在机器人电驱与伺服控制、硬件电路设计、嵌入式实时系统开发、C/Verilog编程、FPGA逻辑设计、测控与自动化、系统集成与软硬件协同,智慧农业(数字化感知、智能决策、精准作业等),MEMS传感器与执行器、成果转化与产品落地等方面有丰富经验的同学或学者加盟课题组。
We do not merely prioritize test scores, academic qualifications, or publication records. Individuals with vision and insight in fields such as Mechanical Engineering (Mechatronics/Robotics preferred), Automation, Electronic Science and Technology, Integrated Circuit Design and Integrated Systems, Mathematics, Electrical Engineering, Physics, and other related disciplines are warmly welcome to apply for Master's or Ph.D. programs. Early admission to the research group is also highly encouraged! Currently, every member of our team—whether Chinese or international—is involved in both theoretical research and engineering development, spanning both hardware and software. All application materials submitted, including the CV and research proposal, must be objective, truthful, and factual. We welcome students to complete their studies through the Chinese Government Scholarship, Guizhou University Scholarship, or self-funding (See https://webplus.gzu.edu.cn/_s298/main.psp for detail).
Priority will be given to candidates or scholars with extensive experience in Robotic Electric Drives and Servo Control, Hardware Circuit Design, Embedded Real-Time System Development, C/Verilog Programming, FPGA Logic Design, Measurement, Control and Automation, System Integration and Hardware-Software Co-Design, Smart Agriculture (digital sensing, intelligent decision-making, precision operation, etc.), MEMS Sensors and Actuators, as well as Technology Transfer and Product Implementation.
教育经历
Education Experience
2010.09-2014.06,重庆大学,机械工程,博士
Chongqing University,Mechanical Engineering,PhD
2006.09-2009.06,重庆大学,机械工程,硕士
Chongqing University,Mechanical Engineering,Master
2001.09-2005.06,重庆大学,机械设计制造及自动化,学士
Chongqing University,Mechanical Design, Manufacturing and Automation,Bachelor
2019.01-2020.01,University of Texas in the U.S.,控制科学与工程(Control Science and Engineering)
代表性工程落地产品
Representative Engineering Implementation Products
1. 生物颗粒燃料智能上下料系统研发
Development of an Intelligent Feeding and Unloading System for Biomass Pellet Fuel
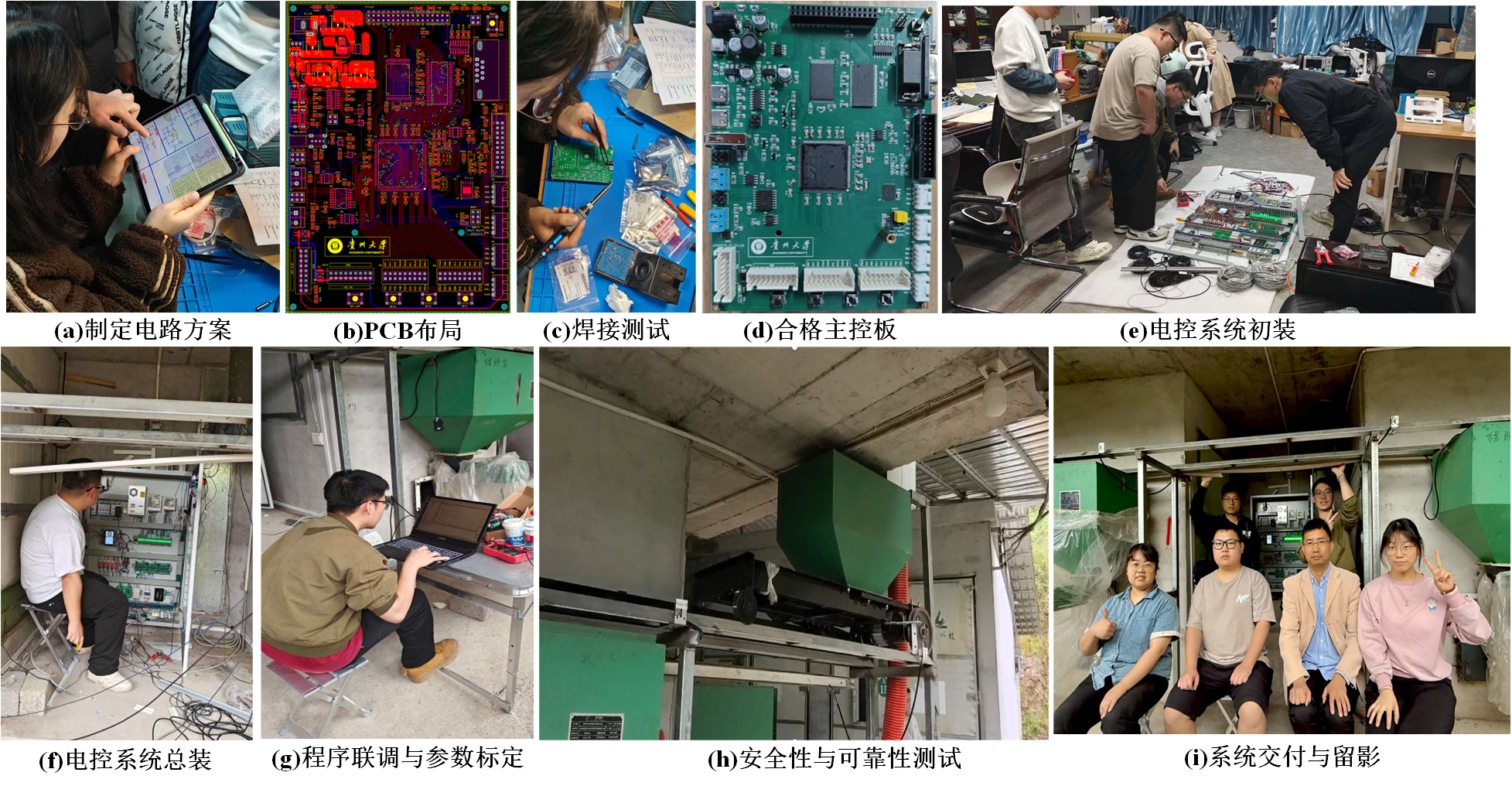
2. 基于履带底盘的施肥起垄覆膜一体智能机研发
Intelligent Integrated Fertilization, Ridging and Film Mulching Machine Based on Crawler Chassis
做实验室的创新者、工程落地的实干派、装备现场的践行者
Be an innovator in the lab, a hands-on doer in engineering implementation, and a practitioner on the equipment site
代表性科研项目
Representative Research Projects
1.贵州省科学技术基金重点项目, 黔科合基础ZD[2025]084, 存感一体耦合微机电系统芯片的非线性分析与攻防控制研究, 在研, 主持
2.科学技术部外国专家项目,DL2023038001L,高性能MEMS陀螺仪的动力学分析与鲁棒控制研究,已结题, 主持;
3.国家自然科学基金,52065008,MEMS陀螺仪的非线性动力学分析与自适应控制研究,已结题,主持;
4.研究生课程思政示范课程项目,KCSZ2021012,先进制造技术,已结题,主持;
5.省高层次人才创新创业项目,(2021)08,MEMS陀螺仪的动态特性分析与自适应稳定控制,已结题,主持
6.省科技厅自然科学基金,[2020]1Y274,高精度MEMS谐振器的系统建模与自适应控制技术研究,已结题,主持;
7.国家自然科学基金,51505170,柔性滤波驱动机构的自适应控制方法研究,已结题,主持;
8.中国博士后科学基金项目,2015M572445,行星齿轮驱动机构的自适应神经网络控制研究,已结题,主持;
9.省教育厅自然科学基金,[2018]111,伺服驱动机构系统的鲁棒控制研究,已结题,主持;
10.中央高校基本科研业务费创新人才专项项目,CDJRC171202,伺服驱动机构系统的动力学行为与控制策略研究,已结题,主持;
11.国家自然科学基金面上项目,51475051,基于仿生耦合界面的新型精密行星传动多场多参量耦合非线性动态特性研究,已结题,参加;
12.国家自然科学基金重点项目,61933012,动态环境下的无人系统先进控制理论及自主协作策略研究,已结题,参加;
13.国家自然科学基金国际(地区)合作与交流项目,61860206008,基于脑操作性条件反射的控制理论及其在柔性灵巧欠驱机器人系统中的应用,在研,参加;
14.国家自然科学基金重点项目,50735008,新型高性能传动件及系统的可靠性设计理论与方法,已结题,参加。
代表性科研论文
Representative Research Papers
[1] Shaohua Luo, Ya Zhang, Ye Cao, Frank L. Lewis, Complexity dynamics and fuzzy optimal prescribed-time control of a large network of bidirectionally coupled FO PMSG[J], IEEE Transactions on Systems, Man and Cybernetics: Systems, 2026, DOI: 10.1109/TSMC.2026.3652808, SCI1区, IF8.7
[2] Wenliang Qi, Shaohua Luo*, Zan Ding, Shuyun Lin, Hassen M. Ouakad, Dynamics analysis, integrated circuit implementation, and prescribed performance backstepping control of a coupled network of 5-DOF Duffing-type MEMS resonators [J], Chaos, Solitons and Fractals, 2026, 203: 117613, SCI1区, IF5.3
[3] Shaohua Luo, Yongduan Song, Ya Zhang, Hassen M. Ouakad, Modeling, dynamical analysis and neural funnel synchronization control of fractional-order coupled PMSMs [J], IEEE Transactions on Industrial Electronics, 2026, 73(2): 2972-2983, SCI1区, IF7.2
[4] Yongzhen Xie, Shaohua Luo*, Fugui Zhang, Guangwei Deng, Hassen M. Ouakad, Dynamic analysis, PCB-based circuit implementation and event-triggered fuzzy neural backstepping control of 3-DOF Duffing-type MEMS resonator [J], Chaos, Solitons and Fractals, 2025, 201(2): 117266, SCI1区, IF5.3
[5] Haifeng Deng, Shaohua Luo*, Guangwei Deng, Hassen M. Ouakad, Dynamical analysis, circuit implementation and adaptive backstepping control of the FO MEMS triaxial gyroscope with output constraints [J], Chaos, Solitons and Fractals, 2025, 201(1): 117092, SCI1区, IF5.3
[6] Linxue Shen, Shaohua Luo*, Shaobo He, Tingyao Hu, Hassen M. Ouakad, Dynamical analysis and accelerated adaptive prescribed performance control of a small coupling network of MEMS gyros[J], Chaos, Solitons and Fractals, 2025, 196:116415, SCI1区, IF5.3
[7] Tingyao Hu, Shaohua Luo*, Ya Zhang, Guangwei Deng, Hassen M. Ouakad, Dynamical analysis and event-triggered neural backstepping control of two duffing-type MEMS gyros with state constraints[J], Chaos, Solitons and Fractals, 2024, 189(1): 115691, SCI1区, IF5.3
[8] Shaohua Luo, Yongduan Song, Ya Zhang, Hassen M. Ouakad, Frank L. Lewis, Dynamic analysis and neural-adaptive prescribed-time control of the FO memristive magnetic-field electromechanical transducer [J], IEEE Transactions on Cybernetics, 2025, 55(1): 2168-2267, SCI1区, IF10.5.
[9] Hao Li, Shaohua Luo*, Ya Zhang, Yinquan Yu, Hassen M. Ouakad, Discrete-time event-triggered type-2 fuzzy wavelet neural network tracking control for multi-motor servo system [J], Information Sciences, 2024, 683:121297, SCI1区.
[10] Shaohua Luo, Yongduan Song, Guangwei Deng, Junxing Zhang, Hassen M. Ouakad, Prescribed-Time fault-tolerant control of the FO decoupled dual-mass MEMS gyro with deferred constraints-design and implementation [J], IEEE Transactions on Systems, Man Cybernetics-Systems, 2024, 54(10):6372-6384, SCI1区, IF8.6.
[11] Zhiwei Chen, Shaohua Luo*, Yinquan Yu, Kai Wang, Hassen M. Ouakad, Distributed synchronization method of multi-motor driving system's accelerated backstepping tracking control [J], ISA Transactions, 2024, 152:81-95, SCI2区, IF6.5.
[12]Shaohua Luo, Yongduan Song, Frank L. Lewis, Guangwei Deng, Dynamical analysis, circuit design and fuzzy prescribed performance backstepping control of the FO weakly coupled MEMS resonators [J], IEEE Transactions on Fuzzy Systems, 2024, 32(4):1768-1781, SCI1区, IF11.9.
[13] Fengyun Li, Shaohua Luo*, Shaobo He, Hassen M.Ouakad, Dynamical analysis and accelerated adaptive backstepping control of MEMS triaxial gyroscope with output constraints [J], Nonlinear Dynamics, 2023, 111:17123-17140, SCI2区, IF5.6.
[14]Fengyun Li, Shaohua Luo*, Guanci Yang, Hassen M.Ouakad, Dynamical analysis and accelerated adaptive backstepping funnel control for dual-mass MEMS gyroscope under event trigger[J], Chaos, Solitons and Fractals, 2023, 168: 113116, SCI1区, IF9.922.
[15]Shaohua Luo, Yongduan Song, Frank L. Lewis, Roberto Garrappa, Shaobo Li, Dynamic analysis and fuzzy fixed-time optimal synchronization control of unidirectionally coupled FO permanent magnet synchronous generator system [J], IEEE Transactions on Fuzzy Systems, 2023, 31(5):1742-1755, SCI1区, IF12.253.
[16] Shenghai Zhang, Shaohua Luo*, Shaobo He, Hassen M. Ouakad, Analog circuit implementation and adaptive neural backstepping control of a network of four Duffing-type MEMS resonators with mechanical and electrostatic coupling [J], Chaos, Solitons and Fractals, 2022, 162:112534, SCI1区, IF9.922.
[17] Shaohua Luo, Guanci Yang, Junyang Li, Hassen M.Ouakad, Dynamic analysis, circuit realization and accelerated adaptive backstepping control of the FO MEMS gyroscope[J], Chaos, Solitons and Fractals, 2022, 155:111735, SCI1区, IF9.922.
[18] Shaohua Luo, Huanhuan Ma, Fengyun Li, Hassen M. Ouakad, Dynamical analysis and chaos control of MEMS resonators by using the analog circuit [J], Nonlinear Dynamics, 2022, 108(1):97-112, SCI2区, IF5.741.
[19] Shaohua Luo, Yongduan Song, Frank L. Lewis, Roberto Garrappa, Neuro-adaptive optimal fixed-time synchronization and its circuit realization for unidirectionally coupled FO self-sustained electro-mechanical seismograph systems [J], IEEE Transactions on Cybernetics, 2023, 53(4):2454-2466, SCI1区, IF19.118.
[20] Shaohua Luo, Xuechun Hu, Le Zhao, Shaobo Li, Event-triggered neural adaptive backstepping control of the k chaotic PMSGs coupled system [J], International Journal of Electrical Power and Energy Systems, 2022, 135:107475, SCI2区, IF5.659.
[21] Shaohua Luo, Frank L. Lewis, Yongduan Song, Roberto Garrappa, Dynamical analysis and accelerated optimal stabilization of the fractional-order self-sustained electromechanical seismograph system with fuzzy wavelet neural network [J], Nonlinear Dynamics, 2021, 104(2): 1389-1404, SCI2区, IF5.022.
[22] Shaohua Luo, Frank L. Lewis, Yongduan Song, Hassen M. Ouakad, Optimal synchronization of unidirectionally coupled FO chaotic electromechanical devices with the hierarchical neural network [J], IEEE Transactions on Neural Networks and Learning Systems, 2022, 33(3):1192-1202, SCI1区, IF14.255.
[23] Shaohua Luo, Shaobo Li, Guanci Yang, Hassen M. Ouakad, Farzad Karami, Dynamical analysis and anti-oscillation-based adaptive control of the FO arch MEMS with optimality[J], Nonlinear Dynamics, 2020, 101(1),293-309, SCI2区, IF4.864.
[24] Shaohua Luo, Frank L. Lewis, Yongduan Song, Hassen M. Ouakad, Accelerated adaptive fuzzy optimal control of three coupled fractional-order chaotic electromechanical transducers [J], IEEE Transactions on Fuzzy Systems, 2021, 29(7):1701-1714, SCI1区, IF12.029.
[25] Shaohua Luo, Frank L. Lewis, Yongduan Song, Kyriakos G. Vamvoudakis, Adaptive backstepping optimal control of a fractional-order chaotic magnetic-field electromechanical transducer [J], Nonlinear Dynamics, 2020, 100(1): 523-540, SCI2区, IF4.864.
[26] Shaohua Luo, Junyang Li, Shaobo Li, Jianjun Hu, Dynamical analysis of the fractional-order centrifugal flywheel governor system and its accelerated adaptive stabilization with the optimality [J], International Journal of Electrical Power and Energy Systems, 2020, 118: 105792, SCI2区, IF4.418.
[27] Shaohua Luo, Shaobo Li, Farid Tajaddodianfar, Jianjun Hu, Anti-oscillation and chaos control of the fractional-order brushless DC motor system via adaptive echo state networks [J], Journal of the Franklin Institute, 2018, 355(14):6435-6453, SCI2区, IF3.576.
[28] Shaohua Luo, Shaobo Li, Trandinh Phung, Jianjun Hu, Chaotic behavior and adaptive control of the arch MEMS resonator with state constraint and sector input [J], IEEE Sensors Journal, 2018, 18(17): 6986-6995, SCI3区, IF2.617.
[29] Shaohua Luo, Ruizhen Gao, Chaos control of the permanent magnet synchronous motor with time-varying delay by using adaptive sliding mode control based on DSC [J], Journal of the Franklin Institute, 2018, 355(10):4147-4163, SCI2区, IF3.576.
[30] Shaohua Luo, Shaobo Li, Farid Tajaddodianfar, Jianjun Hu, Adaptive synchronization of the fractional-order chaotic arch micro-electro-mechanical system via Chebyshev neural network[J], IEEE Sensors Journal, 2018, 18(9): 3524-3532, SCI3区, IF2.617.
[31] Shaohua Luo, Shaobo Li, Farid Tajaddodianfar, Jianjun Hu, Observer-based adaptive stabilization of the fractional-order chaotic MEMS resonator [J], Nonlinear Dynamics, 2018, 92(3): 1079-1089, SCI2区, IF4.339.
[32] Shaohua Luo, Shaobo Li, Farid Tajaddodianfar, Adaptive chaos control of the fractional-order arch MEMS resonator[J], Nonlinear Dynamics, 2018, 91(1):539-547, SCI2区, IF4.339.
[33] Shaohua Luo, Yongduan Song, Chaos analysis-based adaptive backstepping control of the micro-electromechanical resonators with constrained output and uncertain time delay [J], IEEE Transactions on Industrial Electronics, 2016, 63(10):6217-6225, SCI1区, IF7.168.
代表性发明专利
Representative Invention patents
[1] 罗绍华, 李昊, 邓光伟, 宋永端, 胡雪纯. 具有事件触发机制的弱耦合分数阶MEMS谐振器加速预设性能控制[P], 发明专利. ZL202310020104.8
[2] 罗绍华, 吴松励, 李俊阳, 胡廷耀. 弱耦合分数阶MEMS谐振器的模拟电路[P], 发明专利. ZL202310019427.5
[3] 罗绍华, 张钧星, 李枫韵, 李昊. 一种分数阶双向耦合永磁同步电机的模拟电路[P], 发明专利. ZL202211103838.4
[4] 罗绍华, 申林雪, 李枫韵, 张钧星. 具有事件触发机制的双质量MEMS陀螺仪的加速自适应反步漏斗控制[P], 发明专利. ZL202211550646.8.
[5] Shaohua Luo, Shaobo Li, Junyang Li, Guanci Yang, Junxing Zhang, Fuzzy finite-time optimal synchronization control method for fractional-order permanent magnet synchronous generator [P], Invention patent of USA. US11616460B1.
[6]罗绍华, 李枫韵, 杨观赐, 陈志威. 具有输出约束的三轴MEMS陀螺仪加速自适应反演控制方法[P], 发明专利. ZL202210937153.3
[7]罗绍华, 李俊阳, 李昊, 李少波. 分数阶永磁同步发电机的模糊有限时间最优同步控制方法[P], 发明专利. ZL202111246916.1
[8] Shaohua Luo, Junyang Li, Xuechun Hu, Shaobo Li, Adaptive event-triggered control method for permanent magnet synchronous generator coupled chaotic network system [P], Invention patent of England. GB2597380.
[9] 罗绍华, 胡雪纯, 肖凯文, 赵乐, 杨观赐. 永磁同步发电机耦合混沌网络系统的自适应事件触发控制方法[P], 发明专利. ZL202110525791.X.
[10] 罗绍华, 马欢欢, 张生海, 李枫韵, 李少波. MEMS谐振器自适应混沌控制电路及方法[P], 发明专利. ZL202110405685.8.
[11] 张钧星, 罗绍华, 李少波, 牛程程, 周鹏, 冯陈定, 赵乐. 一种永磁同步电机混沌系统自适应动态面控制方法[P], 发明专利. ZL201811324771.0.
[12] 罗绍华, 赵乐, 李俊阳, 李少波. 互耦分数阶混沌机电换能器加速自适应模糊控制方法[P], 发明专利. ZL201910819126.4.
[13] 罗绍华, 赵乐, 张钧星, 李少波. 具有磁滞特性的分数阶静电驱动微机电系统控制方法[P], 发明专利. ZL201910316228.4.
[14] 罗绍华, 李少波, 胡雪纯, 宋永端, F. 路易斯. 具有约束的分数阶自持式机电地震仪系统加速稳定控制方法[P], 发明专利. ZL202010157834.9.
[15] 罗绍华,李少波,杨观赐,周鹏. 一种分数阶机械式离心调速器系统的加速自适应稳定方法[P]. 发明专利. ZL201811520001.3.
[16] Shaohua Luo, Shaobo Li, Lv Yang, Guanci Yang, Accelerated stabilization control method of fractional-order self-sustained electromechanical seismograph system with constraints [P]. Invention patent of England. GB2585988.
[17] 张钧星,罗绍华,王时龙,李少波,周鹏. 一种PMSM混沌系统神经网络反演控制方法[P]. 发明专利. ZL201910770168.3.
学术兼职
Academic Part-Time Job
担任国家自然科学基金委/教育部相关人才计划评审专家、国家/省自然科学基金同行评议专家、教育部学位与研究生教育发展中心研究生学位论文(硕、博)评审专家、全国本科毕业论文(设计)抽检评审专家、博士学位论文抽检评审专家、国内外顶尖学术期刊IEEE Transactions on Industrial Electronics(SCI1区), IEEE Transactions on Neural Networks and Learning Systems(SCI1区), IEEE Transactions on Systems, Man and Cybernetics: Systems(SCI1区), International Journal of Engineering Science(SCI1区), Information Sciences(SCI1区), Applied Mathematics and Computation(SCI1区), Chaos, Solitons & Fractals(SCI1区), Automation in Construction(SCI1区), IEEE/ASME Transactions on Mechatronics(SCI1区), Aerospace Science and Technology(SCI1区), Neural Networks(SCI1区), Knowledge-Based Systems(SCI1区),Expert Systems with Applications(SCI1区), Nonlinear Dynamics(SCI2区), International Journal of Electrical Power and Energy Systems(SCI2区), Neurocomputing(SCI2区), ISA Transactions(SCI2区), International Journal of Robust and Nonlinear Control(SCI2区), Engineering Applications of Artificial Intelligence(SCI2区), IEEE Transactions on Circuits and Systems(SCI2区), IEEE Sensors Journal(SCI2区), Journal of the Franklin Institute(SCI2区), Engineering Structures(SCI2区), Biomedical Signal Processing and Control(SCI2区), Case Studies in Thermal Engineering(SCI2区),Ocean Engineering(SCI2区), Biomedical Signal Processing and Control(SCI2区), Case Studies in Thermal Engineering(SCI2区)和Technological Forecasting and Social Change(SSCI1区)等40余本期刊的同行评议专家,是学术桥评审专家库成员、IEEE Member、中国自动化学会与中国人工智能学会会员、International Conference on Mechatronics and Mechanical Engineering联席程序委员会主席和International Conference on Artificial Intelligence Technologies and Applications、International Conference on Electromechanical Control Technology and Transportation等学术委员会委员。
国际合作与交流
International Cooperation and Exchange
与美国University of Texas、Georgia Institute of Technology、Auburn University、意大利University of Bari、法国巴黎高等师范学院和阿曼Sultan Qaboos University等机构的学者保持良好的科研合作关系。
A strong research collaboration has been maintained with scholars from institutions such as the University of Texas, Georgia Institute of Technology, and Auburn University in the United States; the University of Bari in Italy; the École Normale Supérieure in France; and Sultan Qaboos University in Oman.